

A Masat-1 azonosítása a NORAD-objektumok közül Doppler észlelések segítségével
Ahhoz, hogy tudjuk venni a Masat-1 jeleit tudnunk kell mikor és hol van. A pozíció és a sebesség meghatározása nem egyszerű, mivel maga a műhold egy 10 cm élhosszú kocka, ami 300-1400 km távolságban van a Földtől. Adott a feladat: meghatározni a műholdunk pályáját. Ezen feladat annyiban egyszerűsödik, hogy 9 objektum közül kell kiválasztani a Masatot, melyek a felbocsátott űreszközöket jelentik. Mi a kiválasztást a rádiófrekvenciás Doppler-effektus segítségével végeztük.
Ennek menete a következő volt: Az AGI STK 9 program segítségével kiszámítottuk a közzétett TLE-k alapján az egyes objektumokra az áthaladások során az észlelőhelyről mérhető látszólagos vivőfrekvencia időbeli lefutását, mely a műholdak különböző radiális sebessége és pozíciója miatt a Doppler-effektus következtében eltérő minden objektumra. A TLE-kből a pályákat az SGP4 algoritmus alapján számolták a programok. A látszólagos vivőfrekvencia értékét az áthaladások során létesített rádiókapcsolat során mértük is. A mért és számított adatokat egy közös diagramban ábrázoltuk, és ez alapján döntöttünk.
A mérések könnyítése érdekében a legelső észleléseket követően 7 TLE közül kiválasztottunk egyet és a számítógép ez alapján vezérelte a rádiót, mi pedig ehhez képest kézzel korrigáltunk. Minden esetben az eredő frekvenciát rögzítettük. Az antennát saját fejlesztésű programmal és forgató vezérlővel irányította a számítógép automatikusan a megfelelő pozícióba, ugyanazon TLE-k alapján, amiket a látszólagos frekvencia kiszámításához alkalmaztunk.
A frekvenciaértékeket eleinte kézzel rögzítettük fél perces mintavételezéssel. Ezen módszer pontatlansága időben nagyon nagy, az emberi hiba lehetősége miatt. Az időbeli pontosság javítására a kézi adatrögzítést kiváltottuk számítógépes adatrögzítésre, a frekvenciarögzítés egy másodpercenként történt Yaesu FT897D rádióval és saját szoftverrel. A frekvencia követése a demodulált jel megjelenített spektrumvízesése alapján történt. A vivő- és a két oldalsávi jelet egy-egy 100 Hz szélességű ablakban tartottuk. Minél több mérést végeztünk, annál biztosabban látszott, melyik objektum lehet a Masat-1, mivel az idő előre haladtával a műholdak közötti távolság egyre nagyobb lett, így a látszólagos frekvenciák időbeli lefutásának grafikonja is széttolódott.
Az észleléseink és a számítások közötti eltérések két legnagyobb forrása a műhold rádióadója valódi frekvenciájának eltérése a névlegestől, mellyel a számítást végeztük, illetve az észleléskor használt időmérőnk pontatlansága. A Masat-1 névleges frekvenciája eltérhet 437,345 MHz-től, mivel a fent lévő oszcillátor hőmérsékletfüggő. Valójában a segédvívő frekvenciája 1,2 kHz-el feljebb van, tehát 437,3462 MHz, azért hogy a fent keletkező FSK jelet USB módban a 437,345 MHz-es frekvencián lehessen venni. Esetünkben ez a 1,2 kHz frekvenciabeli különbség a forrás frekvenciájában lényegében az észlelt értékekhez egységesen hozzáadódik, 0,1 Hz hibahatáron belül. Számításaink során a relativisztikus effektusokat is elhanyagoltuk, melyek 1 Hz hibát eredményeznek. Az időbeli eltéréseket csökkentendő a számítógépet úgy állítottuk be, hogy minden nap szinkronizálja az óráját a time.windows.com internetes időszerverrel, így az abszolút időmérés pontossága 1 s körülinek becsülhető. További hibát okoz a TLE-k pontatlansága, mivel ezen pályaadatok alapján számolja ki a program a műhold radiális sebességét a megfigyelőhöz viszonyítva.
Ahhoz, hogy lássuk mennyire pontos a mérésünk, elvégeztük a mérést és az összehasonlító számítást egy másik, azonosított műholdra, a CO-58-ra. Ez egy japán műhold, amit 2003-ban bocsátottak fel, azóta sugároz távíróban a 437,465 MHz-es névleges frekvencián, amitől a tapasztalatok szerint egy 1,2 kHz körüli konstanssal tér el fölfelé.
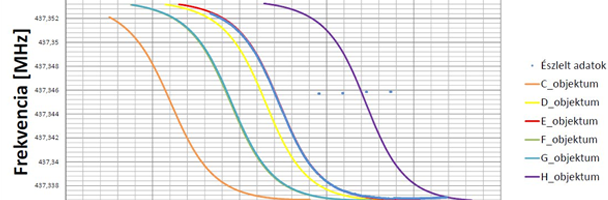
A mérések és összehasonlító számításokból néhány grafikont alább láthatunk. Vízszintes tengelyen az idő van CET-ben a téli időszámítás szerint(UTC+1 óra), óra perc másodpercben. Függőleges tengelyen a rádiófrekvencia látható MHz-ben. A feltüntettet segédvívő-korrekció és idő-korrekció értékei megadják, hogy a számolt értékek grafikonja mennyivel van eltolva a függőleges illetve vízszintes tengelyen, hogy a lehető legjobban illeszkedjen az észlelt frekvenciák görbéjére. Ezzel a sugárzott vivőfrekvencia korrekcióját illetve a saját és a TLE készítésekor használt abszolút időmérés közti eltérés korrekcióját tudjuk elvégezni. A Masat-1-es görbéknél a kirívóan eltérő értékek az adásra kapcsolás miatt jelentkeznek. A görbék elején az elszórt illetve a későbbi görbétől eltérő értékek azért vannak jelen, mert ekkor még nem vettük a műholdat, így nem tudtunk ráállni a frekvenciájára.
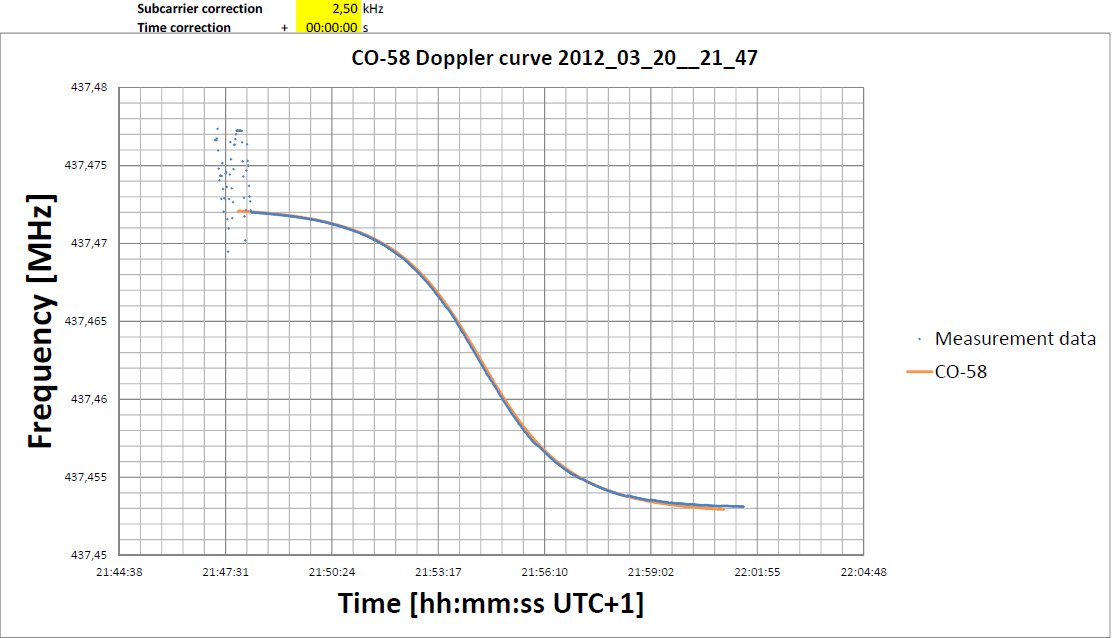
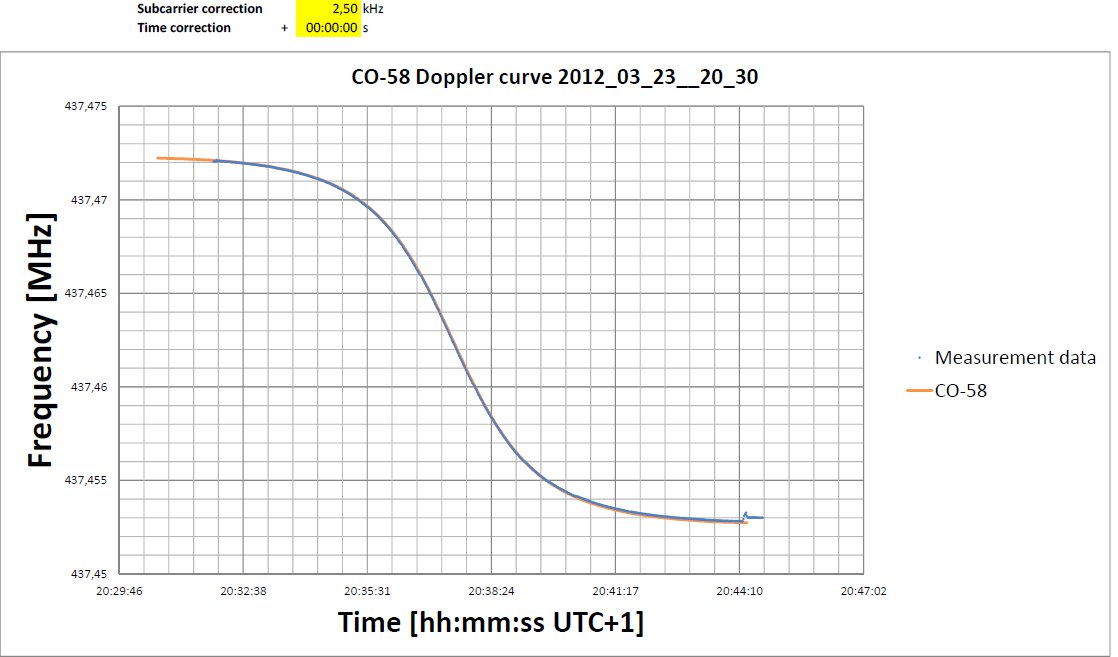
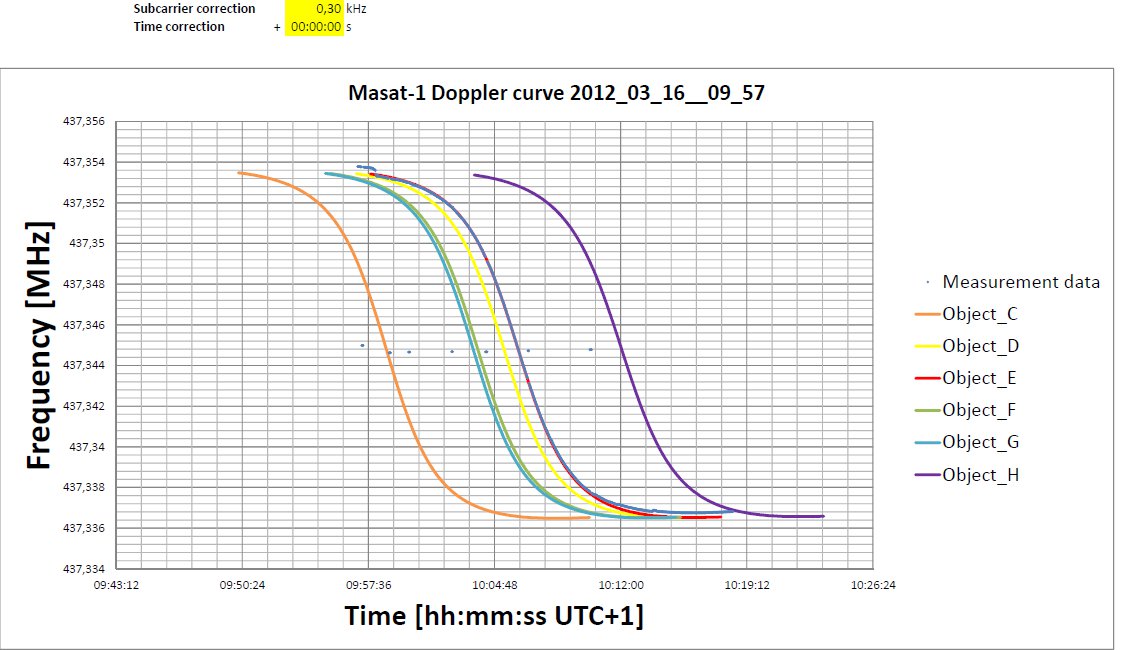
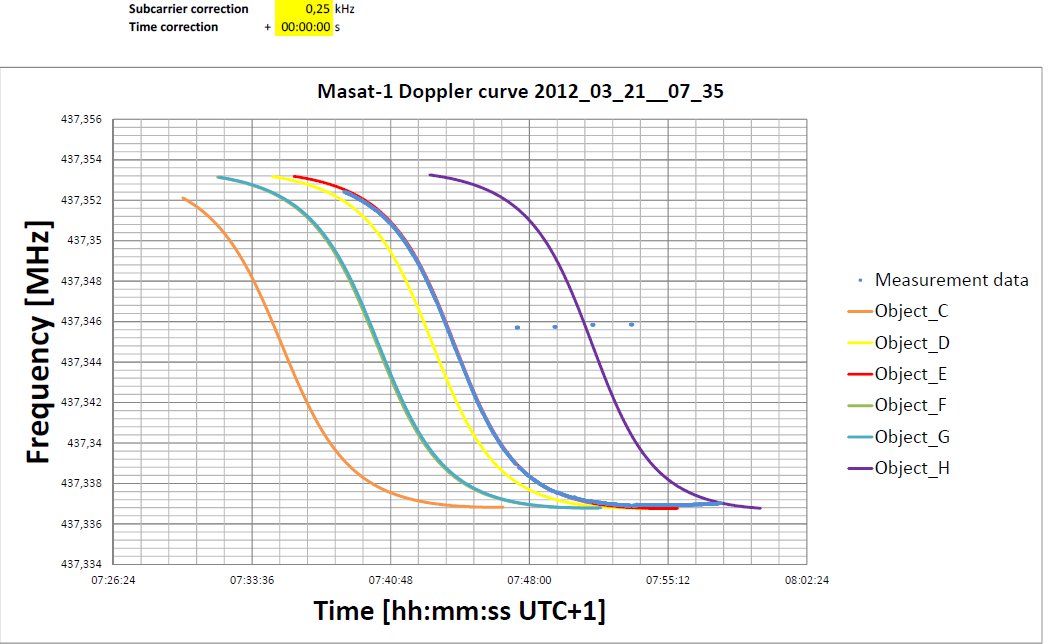
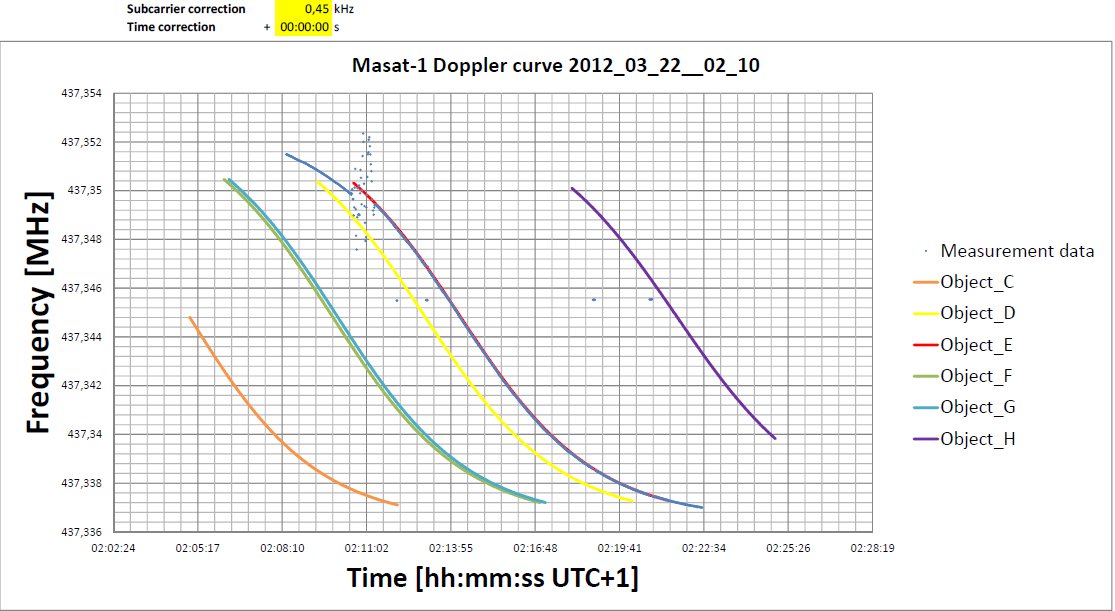
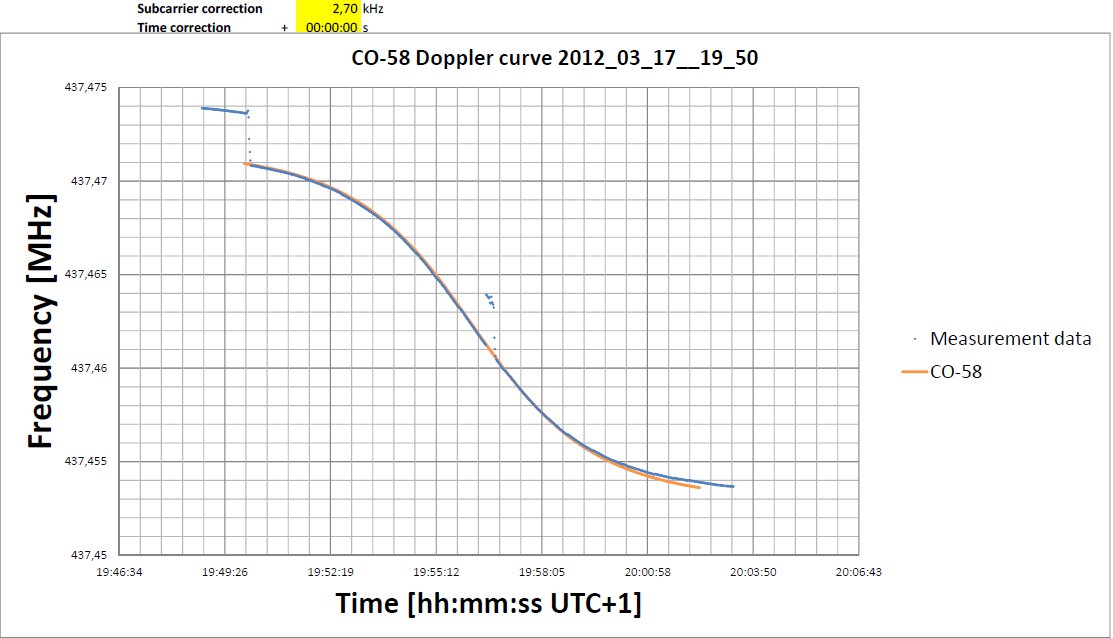
Összességében megállapítható, hogy az észlelt és a számított grafikonok közötti eltérés minimális az E objektum esetében, míg a többi objektumra számított görbék és az észlelés között jelentős az eltérés. A CO-58-cal végzett referenciamérésekből látható, hogy a jelforrás ismert frekvenciahibája, mely 1-2 kHz nagyságrendű, szépen korrigálható, és ekkor a görbék jól fedik egymást. Döntő azonban, hogy az időmérés korrekciója nélkül is 1-2 másodperces eltérésen belüli az észlelt és a számított görbe lefutása abban a szakaszban, ahol a frekvenciagörbe jelentősen változik. Ezzel megbizonyosodtunk az általunk használt és a TLE-k számításakor, mérésekor használt abszolút időmérés egyezéséről.
Ugyanilyen nagyságrendű időbeli eltérés mutatkozik a Masat-1-gyel felvett mérések és az E objektummal végzett számítások között is. A D objektum van legközelebb az E objektumhoz, de az idő- és frekvencia beli távolság a mérés hibájánál sokkal nagyobb; a jellemző időbeli eltérés a két objektum között 20-60 másodperc, frekvenciabeli eltérés 1000-2000 Hz. Így a két objektum a Doppler-mérések alapján egyértelműen megkülönböztethető.
Méréseink alapján tehát nagy biztonsággal megállapítható, hogy a Masat-1 az E objektum.
Népszerű bejegyzések



